
|
Abhishek Joshi I am an incoming CS M.S.E. at Princeton University advised by Dr. Jia Deng in the Princeton Vision and Learning Lab. Previously, I recieved my undergrdauate degree at the University of Texas at Austin where I graduated as part of the Turing Scholars program and was advised by Dr. Yuke Zhu in the Robot Perception and Learning Lab. I am an engineer interested in developing frameworks to enhance robot learning for the real world. Recently, I have worked on projects involving large scale simulation environments resembling human-centric environments and bridging the sim2real gap between the real and virtual worlds. |
Research |

|
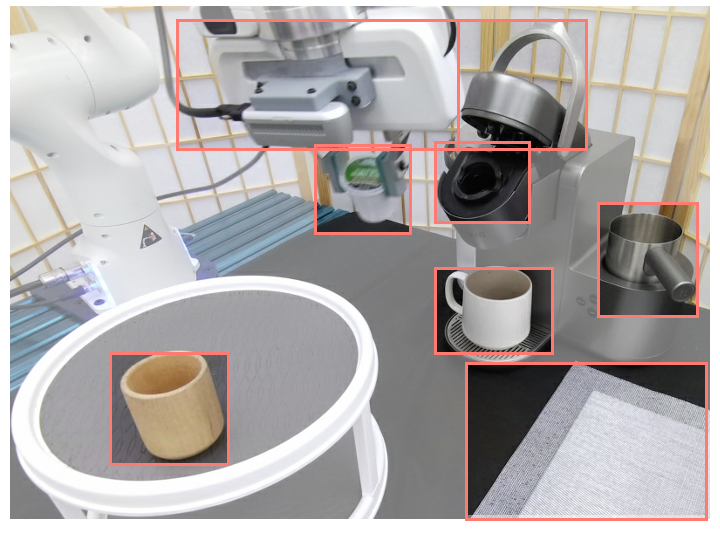
RoboCasa: Large-Scale Simulation of Everyday Tasks for Generalist Robots
Soroush Nasiriany, Abhiram Maddukuri, Lance Zhang, Adeet Parikh, Aaron Lo, Abhishek Joshi, Ajay Mandlekar, Yuke Zhu Robotics: Science and Systems (RSS), 2024 [Website] [Code] |
|
Utilizing Diverse and Scalable Simulation for Mobile Manipulators in Human-Centric Environments
Abhishek Joshi, Soroush Nasiriany, Yuke Zhu University of Texas at Austin Undergraduate Thesis, 2024 Nominated for Best Undergraduate Thesis |
|
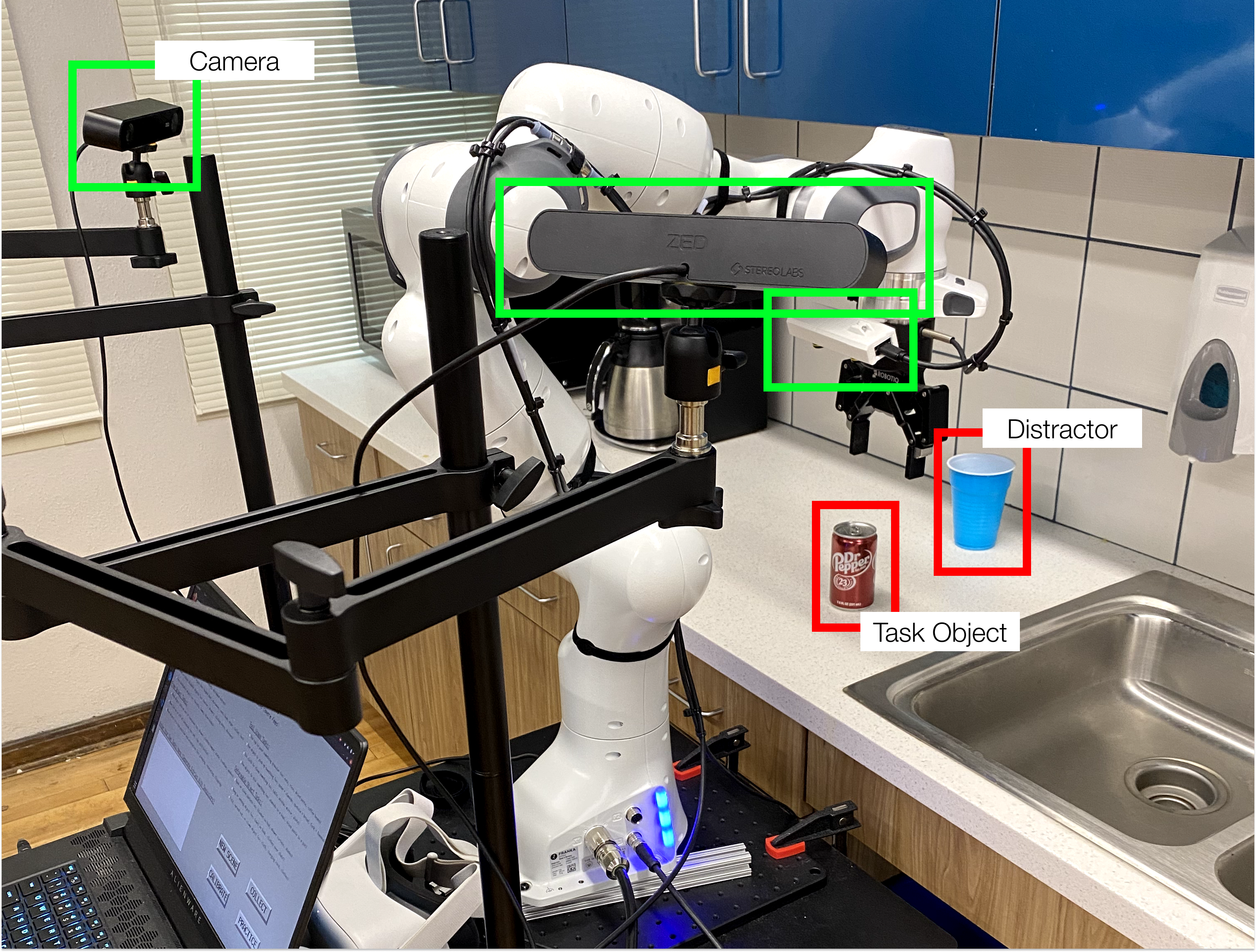
VIOLA: Imitation Learning for Vision-Based Manipulation with Object Proposal Priors
Yifeng Zhu, Abhishek Joshi, Peter Stone, Yuke Zhu Conference on Robot Learning (CoRL), 2022 [Website] [Code] |

|
robosuite: A Modular Simulation Framework and Benchmark for Robot Learning
Yuke Zhu, Josiah Wong, Ajay Mandlekar, Roberto Martín-Martín, Abhishek Joshi, Soroush Nasiriany, Yifeng Zhu Technical report, 2020 [Website] [Code] |
Open Source Contributions |

|
MuJoCo
[Website] [Code] Developed bridge between the MuJoCo physics engine and USD file format to enable rendering of MuJoCo scenes in third party, higher quality renderers including NVIDIA Omniverse and Blender. This effort enables robot learning researchers to train models on higher quality images generated in simulation offline. |